
Le coin du gars qui essaye de réfléchir sur son projet
Comme le poste part sur un format plus ou moins compact, je voudrais m'en faciliter l'usage au maximum, standardiser les modules.
alim électrique
Par exemple, je voudrais prévoir un rail d'alimentation commun. Le plus simple serait de mettre en place un fond de panier comprenant ce rail d'alimentation.
Comme les modules risquent de demander des voltages variés (3.3V, 5.5V, etc.) deux options se présentent :
- centraliser les voltages les plus communs sur une alim principale, un peu comme dans une tour pc
- un rail unique de 12 volts qui sera abaissé aux différents voltages nécessaires par un étage alim présent dans chaque module
Les deux approches ont des avantages et des inconvénients.
Pour des raisons de facilité de trouver du 12V "dans la nature" (lire sur l'allume-cigare d'une voiture), le rail unique 12V semble la meilleure option.
Dans un premier temps, je me contenterai d'utiliser une alim secteur pour fournir le 12V. Par la suite, on pourra envisager de coller des batteries et un circuit de gestion de charge dans l'espace vide du flight case ou dans un module.
bus de comm bas débit
Je voudrais que les différents modules puissent échanger des informations sur un bus commun.
Après quelques recherches / lectures sur le net et échangé rapidement sur discord avec des gens plus calés que moi, des options ont été éliminées, d'autres on émergées :
- I²C pas adapté aux "longues" distances et aux risques d'interférences
- SPI pas adapté parce qu'il nécessite une ligne de sélection pour chaque subordonné. L'eurorack va probablement accueillir entre 5 et 10 modules, ça fait autant de lignes de sélection, pas très efficace.
- UART, ouais, non, clairement pas tel quel !
- RS485 une option de comm très solide, résistante aux perturbations et avec des débits théoriques allant jusqu'à 100mbps. Allié à PJON pour la partie software du réseau, ça pourrait donner des résultats de qualité.
- CANbus avec CANopenNode pour l'implémentation software pourrait être vraiment pas mal parce qu'on obtient un réseau prêt à l'usage, complètement standardisé. Avec une vitesse max de 1mbps pour la version 2.0 et 8mbps pour le CAN-FD, ça suffirait largement pour l'usage que je veux en faire.
façades des modules
Dans un premier temps, j'avais pensé à les réaliser en PCB. Une discussion sur discord m'a convaincu qu'il serait faisable, en prenant le temps et avec une bonne dose d'huile de coude, de les usiner dans une tôle en alu.
Le métal est tendre et une plaque de 2mm à 2,5mm d'épaisseur ferait l'affaire. Les avantages de la façade en alu sont la rigidité, la durabilité et la possibilité d'obtenir des finitions correctes avec des outils simples.
Le seul défaut, c'est que la gravure des infos visuelles sera impossible. Ou alors, faut que je me mette à la gravure sur alu à la main. Même si ça pourrait être très amusant à apprendre, j'ai comme un doute sur la qualité du résultat final. 😅
Pour ce qui est de guider la lumière des leds CMS jusqu'à la façade, l'option la plus simple sont des guides de lumière en plastique transparent. A voir si je trouve des modèles adaptés, pas chers et prêt à l'emploi, si ça sera un bricolage à base de tige en plexy retravaillée ou encore une impression 3D en résine transparente.
Pour les boutons, j'en ai trouvé qui semblent costauds et pas trop chers.
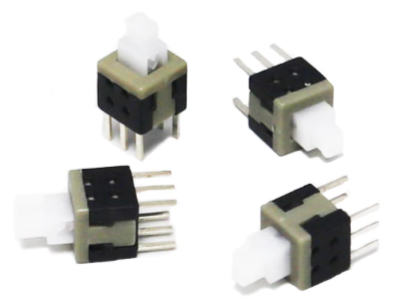
C'est du traversant à 6 pins, une fois soudés, ils devraient ne plus jamais bouger! Ils ne prennent pas beaucoup de place sur un PCB, le boitier en plastique faisant 5,8mm de côté. Ils seront équipés de cabochons pour arriver jusqu'à la façade, faudra en trouver qui me plaisent ou les bricoler moi-même.
En plus, ce sont des DPDTDouble Pole Double Throw. Version schéma électrique, ça donne :  ils offrent donc plein de possibilités qu'un simple un contact NONormally Open, donc ouvert ou repos. ou NCNormally Closed, donc fermé au repos..
ils offrent donc plein de possibilités qu'un simple un contact NONormally Open, donc ouvert ou repos. ou NCNormally Closed, donc fermé au repos..